توضیحات
چکیده
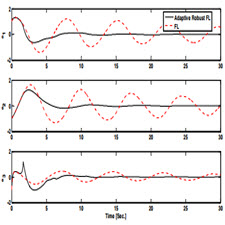
در اين مقاله، پايدارسازي مقاوم تطبيقي کلاس نسبتاً وسيعي از سيستم هاي غيرخطي در حضور نامعيني هاي متغير با زمان ناسازگار مورد بررسي قرار میگیرد. در اين روش شرط محدود کننده مثلثي بودن نامعيني با توجه به مکانيزم طراحي پايدارساز از بين مي رود . پايدارساز طراحي شده مبتني بر تئوري لياپانوف بوده و فرض ميشود که سيستم نامي بدون نامعيني، خطي پذير فيدبک باشد. در روش بيان شده همگرايي مجانبي حالات سيستم حلقه-بسته به سمت صفر و در حضور نامعيني هاي کراندار اثبات ميشود. همچنين در اين روش، به هيچگونه اطلاعاتي از کران نامعيني ها نياز نمي باشد . در ادامه، با تغييرات اندکي بر روي روش ارائه شده، سيگنال کنترلي به گونه اي بهبود پيدا ميکند الکه کليه سيگن هاي سيستم حلقه-بسته نهايتاً کراندار يکنواخت بوده و از کليدزني مکرر هاي در سيگنال کنترلي جلوگيري شود شبي سازي روش بيان شده بر روي سنکرونسازي دو سيستم آشوبناک يکسان راسلر با پارامترهاي متغير با زمان، سرعت بالاي الگوريتم در سنکرونسازي را نشان ميدهد، ضمن اينکه نرم خطا سنکرون سازي کاملاً محدود بوده و سيگنال کنترلي هموار می باشد.
مقدمه
مساله کنترل سیستم هاي نامعین غیرخطی یکی از مهمترین موضوعات در علم مهندسی کنتـرل مـیباشـد. در یـک سیـستم نامعین، هدف طراحی کنترلکننـدهاي اسـت کـه بـا اسـتفاده از معادلات دینامیکی، کنترل سیستم حلقه-بسته با عملکرد مطلوب را انجام دهیم. از یک نقطه نظـر سیـستمهـاي نـامعین را بـه دو دسته خطی و غیرخطی تقسیمبنـدي مـیکننـد. کنتـرل مقـاوم سیستم هاي نامعین غیرخطی یکی از زمینههـاي بـسیار مهـم در مهندسی کنترل بوده و در طول سه دهه گذشته توجه زیـادي را به خود جلب کرده است. در ایـن زمینـه روشهـاي مختلفـی در ارتباط با پایدارسازي سیستم هاي دینامیکی با نامعینی هاي قابـل توجه ارائه شده است .
ABSTRACT
In this paper, the comparative resilience of the relatively large class of nonlinear systems in the presence of inconsistent variables with incompatible time is investigated. In this method, the limiting condition of the triangularity of the uncertainties is eliminated according to the stabilizing design mechanism. The designed stabilizer is based on Lyapunov’s theory and it is assumed that the nominal system is indefinable and is linear in feedbacks. In the presented method, the asymptotic convergence of closed-loop system states is proved to zero and in the presence of bounded indeterminants. Also, in this method, there is no need for any uncertain boundaries. In the following, with slight variations in the proposed method, the control signal is improved so that all closed-loop system signals are uniformly uniform and prevent frequent keypads in the control signal. Simulating the described method on synchronization Two rashler chaos systems with variable time parameters show the speed of the algorithm in synchronization, while the softness of synchronization errors is quite limited and the control signal is smooth.
INTRODUCTION
The problem of controlling nonlinear indeterminate systems is one of the most important issues in control engineering science. In an uncertain system, the goal is to control the controller by using dynamic equations, closed loop system control with optimal performance. From a point of view, unconventional systems are divided into linear and nonlinear categories. Reliable control of nonlinear indistinctive systems is one of the most important areas of control engineering and has attracted a lot of attention over the past three decades. Various methods have been proposed in this regard regarding the stabilization of dynamic systems with significant indeterminacy.
Year: 2010
Publisher : Eighteenth International Energy Conference of Iran
By : Mohammad Mehdi Arefi, Mohammad Reza Jahid Dastghal
File Information: persian Language/ 6 Page / size: 608 KB
سال :1389
ناشر : هجدهمین کنفرانس بین المللی برق ایران
کاری از : محمدمهدي عارفی، محمدرضا جاهدمطلق
اطلاعات فایل : زبان فارسی / 6 صفحه / حجم : KB 608





نقد و بررسیها
هنوز بررسیای ثبت نشده است.