توضیحات
چکیده
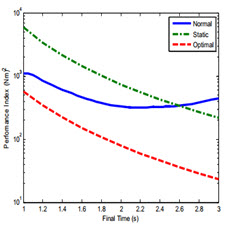
در اين مقاله روشي جديد براي اجراي هم زمان طرّاحي مسير و بالانسينگ <به نام بالانسينگ بهينه> براي روبات دو لينكي برمبناي كنترل بهينه ارائه شده است. بالانسينگ به عنوان يكي از اساسي ترين عملياتي كه براي افزايش قابليت روبات معمولاً باعث کاهش هزينه مصرفی می شود. روش های معمول مانند بالانسينگ استاتيكي، بدون در نظر گرفتن شرايط كاري روبات انجام می شوند. روش پيشنهادي در اين مقاله براي بالانسينگ روبات دولينكي با استفاده از كنترل بهينه می باشد که مسير بهینه و مقادير وزنه هاي بالانسينگ هزينه مصرفي بهينه تري را ارائه می دهند. پس از معرّفي روش و شبيه سازي به بررسي شرايط مختلف بر مقدار بهينه مقادير و بالانسينگ پرداخته ميشود. در این مقاله نشان داده شده است كه بالانسينگ بهينه بيان شده هزينه مصرفي بسيار كمتري نسبت به بالانسينگ استاتيكي خواهد داشت .
مقدمه
جايگزيني روبات براي سالها هاي متمادي به دليل افزايش بهروه وري و سود و حفظ جان كارگرها صورت پذيرفته است. به دليل انجام كارهاي تكراري هرگونه كاهش مصرف انرژي در حركت روباتها باعث كاهش هزينه کل مصرفی کارخانجات خواهد شد. یکی از راه های مناسب براي افزايش قابليت كنترل استفاده ،روبات از بالانسينگ است. در بالانسينگ با اضافه كردن ،اجزائي اضافي به عنوان مثال جرم يا فنر اثرات غيرخطّي در وزن روبات حذف مي شوند. در اكثر تحقيقاتي كه تاكنون صورت گرفته است اين حذف بدون توجه به مقدار مصرف انرژي توسط روبات انجام ميشود كه در اغلب اوقات باعث افزايش هزينه انرژي مصرفي ميشود. براي حل اين مشكل در اين مقاله روشي ،جديد براي بدست آوردن مقادير بهينه وزنه ها ارائه می گردد. مزیت این روش ،نسبت به روش هاي معمول بهينه ،بالانسينگو مسير سازي در بدست آوردن مسير بهينه علاوه بر مقادير جرم بهينه – می باشد.مسئله بهينه سازي يك مسير با در نظر گرفتن قيود ديناميكي و قيود سينماتيكي در نهايت به حل يك مسئله حساب تغييرات منجر خواهد شد. حل تحليلي معادلات ديفرانسيل استخراج شده براي مسير تنها با استفاده از كامپيوتر و روشهاي عددي ممكن است. با تركيب روش هاي طرّاحي مسير و بالانسينگ روش بالانسينگ بهين رائه ميا ه گردد كه قابليت اعمال بر روي هر روباتي را خواهد داشت .
ABSTRACT
In this paper, a new method for simultaneous implementation of path design and balancing, called optimal balancing, is proposed for a two-link robot based on optimal control. Balancing is one of the most fundamental operations that can be used to increase the robot’s ability to reduce costs. Common practices, such as static balancing, are performed regardless of the robot’s operating conditions. The proposed method in this paper is to optimize the optimization of the Dolinky Robot balancing, which provides the optimal route and the balancing weights of the optimal cost. After introducing the method and simulation, different conditions are considered on the optimal value and balancing. It has been shown in this paper that optimized balancing has a much lower consumption cost than static balancing.
INTRODUCTION
Replacing the robot for many years has been done because of increased profitability and saving lives of workers. Due to repetitive work, any reduction in energy consumption in robots will reduce the total cost of the plants. One of the best ways to increase the ability to control the use of the robot is from balancing. In the balancing, adding additional components such as mass or spring, the nonlinear effects are eliminated in the weight of the robot. In most of the research that has been done so far, this removal is done regardless of the amount of energy consumed by the robot, which often increases the cost of consuming energy. To solve this problem, in this paper, a new method is proposed for obtaining optimal weights. The advantage of this method is to optimize the optimal route, in addition to optimal mass values, in comparison with the most commonly used methods, balancing the route in optimum paths. The optimization problem of a path, taking into account the dynamic constraints and kinematic constraints, ultimately solves a change problem problem it will result in. An analytical solution of the extracted differential equations for the path is possible only with the help of computer and numerical methods. By combining path design and balancing techniques, the balancing procedure will be optimized to be applied to any robot.
Year: 2010
Publisher : Eighteenth International Energy Conference of Iran
By : Mojtaba Moradi, Amin Nikobin
File Information: persian Language/ 7 Page / size: 582 KB
سال :1389
ناشر : هجدهمین کنفرانس بین المللی برق ایران
کاری از : مجتبي مرادي ،امين نيكوبين
اطلاعات فایل : زبان فارسی / 7 صفحه / حجم : KB 582





نقد و بررسیها
هنوز بررسیای ثبت نشده است.