توضیحات
چکیده
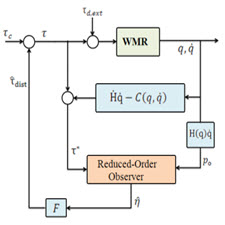
در اين مقاله با در نظر گرفتن قيود غيرهولونوميك براي ربات متحرك چرخدار، مساله رديابي مسير مرجع در حضور اغتشاش هاي خارجي و خطاهاي مدلسازي به عنوان اغتشاش هاي داخلي، مورد بررسي قرار مي گيرد. به همين منظور يك رويتگر اغتشاش (DOB) براي حذف اثرات اين اغتشاشات طراحي ميشود. رويتگرهاي اغتشاش كه يك رهيافت كنترل مقاوم هستند، اغتشاش هاي خارجي را تخمين زده و حذف مي كنند. همچنين براي دستيابي به عملكرد مطلوب رديابي مسير مرجع، رويتگر اغتشاش با كنترل كننده ديناميك و كنترل كننده سينماتيك تركيب شده است. كنترل كننده سينماتيك يك كنترل كننده پسگام است كه شتاب زاويه اي مورد نياز به منظور رديابي مسير مطلوب را بدست مي آورد و كنترل كننده ديناميكي كه كنترل كننده محاسبه گشتاور (CTC) است، گشتاورهاي مورد نياز چرخ ها را با استفاده از اين شتاب مطلوب فراهم مي نمايد. نتايج شبيه سازي نشان ميدهد كه عملكرد كنترل سينماتيك و محاسبه گشتاور در حضور اغتشاش ها، با استفاده از رويتگر اغتشاش بخوبي بهبود يافته است.
مقدمه
ربات متحرك غيرهولونوميك رباتي است كه فقط قادر است در جهت محور چرخهاي متحرك خود حركت كند. يكي از موضوعات بسيار مهم در بحث رباتهاي متحرك چرخدار، بحث رديابي مسير است. در يك كنترل كننده ردياب پايدار با استفاده از تئوري لياپانوف براي ربات متحرك غيرهولونوميك طراحي شده است. يك راه حل معمول براي بكارگيري قانون كنترل سينماتيك در سيستم غيرهولونوميك ديناميكي، روش پسگام ميباشد. اين روش فرمان كنترل سرعت را به شتاب ورودي مطلوب تبديل ميكند. در حضور اغتشاش هاي خارجي عملكرد سيستم كنترلي بشدت كاهش مييابد. براي جبران اثر اين اغتشاش ها و بهبود عملكرد كنترل كننده رديابي مسير، انيشي مفهوم رويت گر اغتشاش(DOB ) را پيشنهاد داد . رويتگرهاي اغتشاش سيستم را مقاوم و عملكرد ديناميكي را بهبود ميبخشند بنابراينبطور گستردهاي در سيستم هاي كنترل حركتي مانند سيستم هاي رباتيك، ديسك سخت شبيه ساز بار الكتريكي و غيره مورد استفاده قرار ميگيرند.
ABSTRACT
In this paper, considering non-holonomic constraints for wheelchairs, the problem of tracking the reference path in the presence of external disturbances and modeling errors are considered as internal disturbances. For this purpose, a disturbance observer (DOB) is designed to eliminate the effects of these disturbances. Disturbance observers, which are a robust control approach, estimate and eliminate external disturbances. Also, to achieve the desired trackback function of the reference path, the turbulence view is combined with the dynamic controller and kinematic controller. The kinematic controller is a post-control controller that obtains the angular momentum needed to track the desired path and the dynamic controller, which controls the torque calculation (CTC), provides the torque required by the wheels using this optimal acceleration It will. Simulation results show that the kinematic control function and torque calculation in the presence of disturbances have been improved by the turbulence viewer.
INTRODUCTION
A non-holonomic moving robot is a robot that can only move in the direction of the axis of its moving wheels. One of the most important issues in the discussion of wheeled mobile robots is the path tracking. In a stable tracker controller, using the Lyapunov theory for a non-holonomic moving robot. A common solution to applying the kinematic control law in a non-holonomic dynamic system is the post-hole method. This method converts the speed control command to the optimal input acceleration. In the presence of external disturbances, the performance of the control system dramatically decreases. In order to compensate for the effect of these disturbances and improve the path tracking controller’s performance, Anish introduced the concept of disturbance observation (DOB). The system’s turbulence observers improve the performance of the system and thus improve dynamic performance, so they are widely used in motion control systems such as robotic systems, hard drive simulators, and so on.
Year: 2010
Publisher : Eighteenth International Energy Conference of Iran
By : Mohammad Nurbad, Alireza Mohammad Shahri and Khoshnam Shojaee
File Information: persian Language/ 6 Page / size: 666 KB
سال :1389
ناشر : هجدهمین کنفرانس بین المللی برق ایران
کاری از : محمد نورباد ، عليرضا محمدشهري و خوشنام شجاعي
اطلاعات فایل : زبان فارسی / 6صفحه / حجم : KB 666



![چالش ها و مزایای بکار گیری و پیاده سازی Devops.[taliem.ir]](https://taliem.ir/wp-content/uploads/چالش-ها-و-مزایای-بکار-گیری-و-پیاده-سازی-Devops.taliem.ir_-150x150.jpg)
نقد و بررسیها
هنوز بررسیای ثبت نشده است.