توضیحات
چکیده
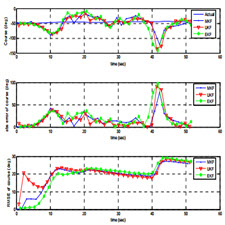
در اين مقاله روشي جديد بر اساس يك تبديل از دستگاه مختصات قطبي به دستگاه مختصات كارتزين براي مساله رديابي اهداف ارائه شده است. با استفاده از اين تبديل، فيلتر كالمن خطي ميتواند براي مسائل رديابي اهداف بر اساس دريافت پارامترهاي فاصله و سمت هدف كه معادلات آنها غيرخطی ، است بكار گرفته شود. الگوريتم ارائه شده مبتني بر روش مرسوم شبه مشاهدات جهت پيدا كردن سطح بازنشاني ماتريس كواريانس خطاي اندازه گيري در وضعيت مانوردار بودن هدف، مي باشد. افزايش دقت تخمين پارامترهاي هدف، سادگي پيادهسازي و كاهش در زمان اجرا، سه مزيت اين تبديل در مقايسه با روشهاي غيرخطي متعارف ميباشد. اجراي برنامه رديابي با در نظر گرفتن بازه وسيعي از سناريوهاي هدف بر اساس روش مونت كارلو برتري فيلتر كالمن تصحيح شده پيشنهادي را نسبت به فيلتر كالمن توسعه يافته و قابل مقايسه بودن نتايج آنرا نسبت به نتايج فيلتر كالمن Unscentedبه ويژه براي اهداف با ديناميك نويزي بالا نشان ميدهد.
مقدمه
فيلتر كالمن يك روش شناخته شده براي رديابي اهداف با مانور (MTT) ميباشد، كه در سال 1960توسط كالمن معرفي گرديد . در مساله رديابي هدف در مختصات كارتزين معادلات رويتگر بصورت خطي ميباشد و در نتيجه فيلتر كالمن استاندارد براحتي پياده سازي ميگردد، در حالي كه داده هاي دريافتي از مشخصات هدف توسط رادار، در مختصات قطبي است. خطاهاي اندازه گيري رادار در كاتالوگ هاي مربوطه نيز در مختصات قطبي بيان ميشود. لذا شبيه سازي رادار بر اساس حالات هدف در مختصات كارتزين منجر به يك رابطه غير خطي ميشود. دو دسته عمده از روشها براي حل مسئله وجود دارند، دسته اول شامل روشهاي مرسوم حل يك معادله غير خطي و دسته دوم روشهاي مبتني بر استفاده از شبه مشاهدات در مختصات كارتزين ميباشند. در توسعه فيلتر كالمن خطي براي حل سيستم هاي غير خطي، ميتوان از دو روش فيلتر كالمن توسعه يافته (EKF) و فيلتر كالمن (UKF) Unscentedنام برد. EKF كه بر پايه خطي سازي درجه اول بسط تيلور بنا شده است، در مواجهه با مسائل MTTداراي محدوديتهائي ميباشد.
ABSTRACT
In this paper, a new method is proposed based on a transformation of the polar coordinate system into the Cartesian coordinate system for the purpose tracking problem. Using this conversion, the linear Calman filter can be used for target tracking problems based on receiving distance and target parameters, whose equations are nonlinear. The proposed algorithm is based on the conventional pseudo-observational method to find the resonance level of the covariance matrix of the measurement error in the target’s maneuverability. Increasing the precision of estimating target parameters, the simplicity of implementation, and the decrease in runtime, have three advantages of this conversion compared with conventional nonlinear methods. The implementation of the tracking program, taking into account the wide range of target scenarios based on the Monte Carlo method, outperforms the proposed corrected Kalman filter compared to the Kalman filter and compares its results with the Unscented Kalman filter results, especially for high-noise targets. gives.
INTRODUCTION
The Calman filter is a well-known method for tracking target by maneuvering (MTT), which was introduced in 1960 by Calman. In the target tracking problem, the Cartesian coordinates of the observation equations are linear, and as a result, the standard Calman filter is easy to implement, while the received data from the radar specification is in polar coordinates. The radar measurement errors are also expressed in polar coordinates in the corresponding catalogs. Therefore, radar simulation, based on the target states in the Cartesian coordinates, leads to a nonlinear relationship. There are two main categories of methods for solving a problem: the first category consists of conventional methods for solving a nonlinear equation and the second is the methods based on the use of pseudo-observations in the Cartesian coordinates. In the development of a linear Kalman filter for solving nonlinear systems, one can use both the Extended Calman filter (EKF) and the Unscented (UKF) filter. The EKF, which is based on Taylor’s first-order linearization, has limitations in confronting MTT issues.
Year: 2010
Publisher : Eighteenth International Energy Conference of Iran
By : Ali Khorrami, Ali Karazar, Hamid Khalozadeh
File Information: English Language/ 6 Page / size: 541 KB
سال :1389
ناشر : هجدهمین کنفرانس بین المللی برق ایران
کاری از : علي خرمي , علي كارساز ,حميد خالوزاده
اطلاعات فایل : زبان انگلیسی / 6 صفحه / حجم : KB 541




نقد و بررسیها
هنوز بررسیای ثبت نشده است.