توضیحات
ABSTRACT
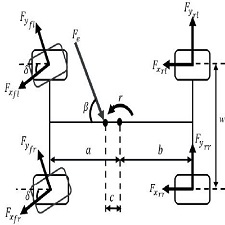
An armoured vehicle tends to lose its dynamic mobility when firing on the move. This is due to the effect of the firing force that reacts at the centre of the weapon platform, which creates an unwanted yaw moment at the vehicle’s centre of gravity. In order to enhance the mobility performance of the armoured vehicle, a control strategy, i.e. yaw rejection control, is designed and test on an armoured vehicle model. The purpose of the control strategy is to maintain the directional mobility of the armoured vehicle by providing a steering correction angle to the pitman arm steering system. The control strategy proposed in this study consists of two main structures: yaw rate feedback control using a Proportional-Integral-Derivative (PID) controller and Lateral Force Rejection Control (LFRC) using an adaptive Fuzzy-Proportional-Integral (adaptive Fuzzy-PI) controller. The simulation results in terms of yaw and lateral motions were observed, and the proposed control strategy was shown to successfully improve the directional mobility of the armoured vehicle after firing. The benefit of the proposed control strategy with adaptive fuzzy-PI control is evaluated by comparing its performance to fuzzy-PI and proportional-integral (PI) control strategies
INTRODUCTION
An online controller is used to provide a stable condition for engineering systems due to the external disturbances and uncertain inputs by automatically changing the controller parameters to satisfy the necessity of system performance. Previous studies confirmed the advantages of fuzzy controller, which has intelligent functions that can be used to predict responses through a learning process, perform optimization work and is capable of maintaining the system performance due to changing condition [1]. However, there are several problems commonly associated with fuzzy controllers. First, it is always designed without obtaining the optimum range of the membership function inputs, value of outputs and controller rules. Without an optimum set of parameters, the performance of the controller and its ability to achieve a specific desired output will be compromised. The second common problem is developing the fuzzy controller on a nonlinear model without identifying the actual system parameters. In this case, a fuzzy controller will produce insignificant output performances. Hence, the control strategy using the existing fuzzy
Year: 2015
Publisher: Mechanical Engineering
By: Zulkiffli Abd Kadir , Saiful Amri Mazlan , Hairi Zamzuri , Khisbullah Hudha1 , Noor Hafizah Amer
File Information : English Language / 9 Page / Size : 1.6 M
Download : click
سال : 2015
ناشر : Mechanical Engineering
کاری از : Zulkiffli Abd Kadir , Saiful Amri Mazlan , Hairi Zamzuri , Khisbullah Hudha1 , Noor Hafizah Amer
اطلاعات فایل : زبان انگلیسی / 9 صفحه / حجم : 1.6 M
لینک دانلود : روی همین لینک کلیک کنید





نقد و بررسیها
هنوز بررسیای ثبت نشده است.